Find the differences
Developer @Corley SRL
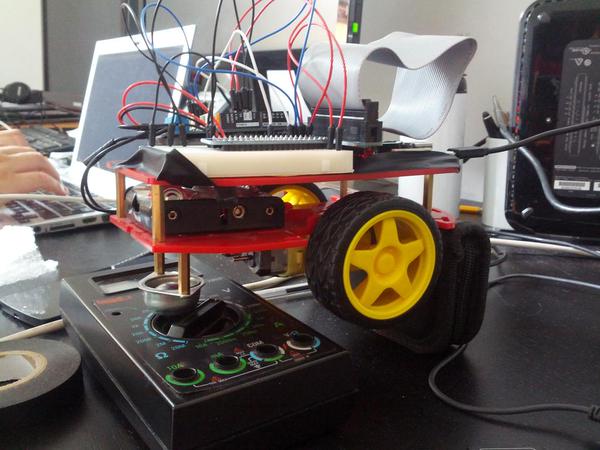
Ingredients
- Raspberry Pi+
- Stripboard, MotorShield, Chassis
- Golang --> GoBot.io
- MQTT
- Walter dal Mut
Implementation
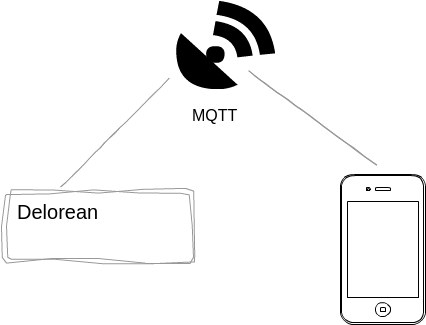
MQTT
MQ Telemetry Transport
- Thinked by IBM for Internet of Things
- Application Protocol over TPC/IP
- Real Time and Pub/Sub implementation
- Simplicity, simplicity, simplicity!
- 0 - without warranty
- 1 - Message delivered but it can be duplicated
- 2 - Message delivered without duplication
- Networkin handling
Golang
Go is an open source programming language that makes it easy to build simple, reliable, and efficient software.
- Powerd by Google
- Async and parallel design
- Funny
Gobot.io
Next generation robotics framework with support for 15 different platforms
package main
import (
"time"
"github.com/hybridgroup/gobot"
"github.com/hybridgroup/gobot/platforms/gpio"
"github.com/hybridgroup/gobot/platforms/raspi"
)
func main() {
gbot := gobot.NewGobot()
r := raspi.NewRaspiAdaptor("raspi")
led := gpio.NewLedDriver(r, "led", "7")
work := func() {
gobot.Every(1*time.Second, func() {
led.Toggle()
})
}
robot := gobot.NewRobot("blinkBot",
[]gobot.Connection{r},
[]gobot.Device{led},
work,
)
gbot.AddRobot(robot)
gbot.Start()
}
Overview
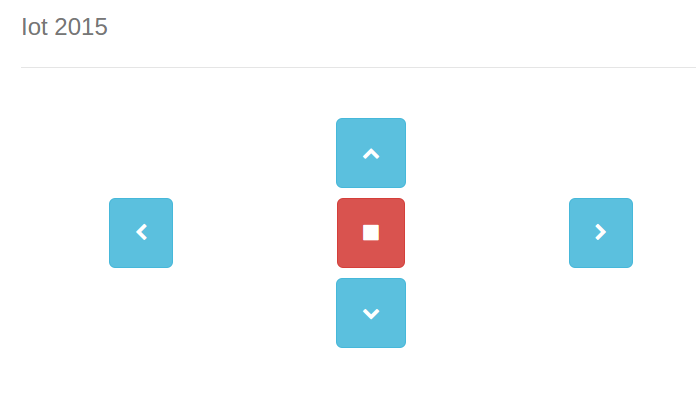
Controller
Controller
Start webserver
func main() {
http.HandleFunc("/", homeHandler)
http.HandleFunc("/api", apiHandler)
http.ListenAndServe(":8080", nil)
}
Controller
MQTT publisher
data, _ := ioutil.ReadAll(r.Body)
var b byte
var opts = MQTT.NewClientOptions()
opts.AddBroker("tcp://test.mosquitto.org:1883")
c := MQTT.NewClient(opts)
t := c.Connect()
t.Wait()
c.Publish("go-iot", b, false, data)
content := []string{"OK"}
js, _ := json.Marshal(content)
w.Write(js)
Controller
Templating
func homeHandler(w http.ResponseWriter, r *http.Request) {
w.Header().Set("Content-Type", "text/html; charset=UTF-8")
t, _ := template.ParseFiles("tpl/home.html")
t.Execute(w, map[string]string{})
}
Delorean
Select PIN- GoBot.io
gbot := gobot.NewGobot()
r := raspi.NewRaspiAdaptor("raspi")
dirA := gpio.NewLedDriver(r, "dirA", "3")
dirB := gpio.NewLedDriver(r, "dirB", "5")
pwmA := gpio.NewLedDriver(r, "pwmA", "7")
pwmB := gpio.NewLedDriver(r, "pwmB", "15")
Delorean
Getting Started
work := func(){
dirA.On()
dirB.Off()
}
car := gobot.NewRobot("mqttBot",
[]gobot.Connection{r},
[]gobot.Device{dirA, dirB, pwmA, pwmB},
work,
)
Delorean
MQTT support - GoBot
mqttAdaptor := mqtt.NewMqttAdaptor("go-iot", "tcp://test.mosquitto.org:1883", "raspy")
work := func() {
mqttAdaptor.On("go-iot", func(data []byte) {
if string(data) == "giu" {
}
}
Delorean
Change direction - GoBot
if string(data) == "right" {
dirA.Off()
dirB.On()
pwmA.Off()
pwmB.On()
}
if string(data) == "left" {
dirA.On()
dirB.Off()
pwmA.On()
pwmB.Off()
}
Delorean
Delorean current robot - GoBot
car := gobot.NewRobot("mqttBot",
[]gobot.Connection{r, mqttAdaptor},
[]gobot.Device{dirA, dirB, pwmA, pwmB},
work,
)
gbot.AddRobot(car)
gbot.Start()